日本初※となる 「熱電発電システムを用いた自律ロボット」を開発、実地走行テストを行いました。
2021.07.26 お知らせ
ダイニチ工業株式会社(本社:新潟県新潟市、代表取締役社長:吉井久夫)は、国立大学法人東京大学、国立研究開発法人産業技術総合研究所、株式会社KELKと共同して研究開発を進めていた、カセットボンベを燃料とした「熱電発電システムを用いた自律ロボット」を開発しました。
熱電発電システムを用いて自律ロボットを駆動する技術は日本初※であり、同システムの発電量は、可搬型としては日本最高レベルの70Wを達成しました。
7月26日(月)には福島県双葉郡大熊町にて、ロボット駆動の実地走行テストを行いました。
※:当社調べ。
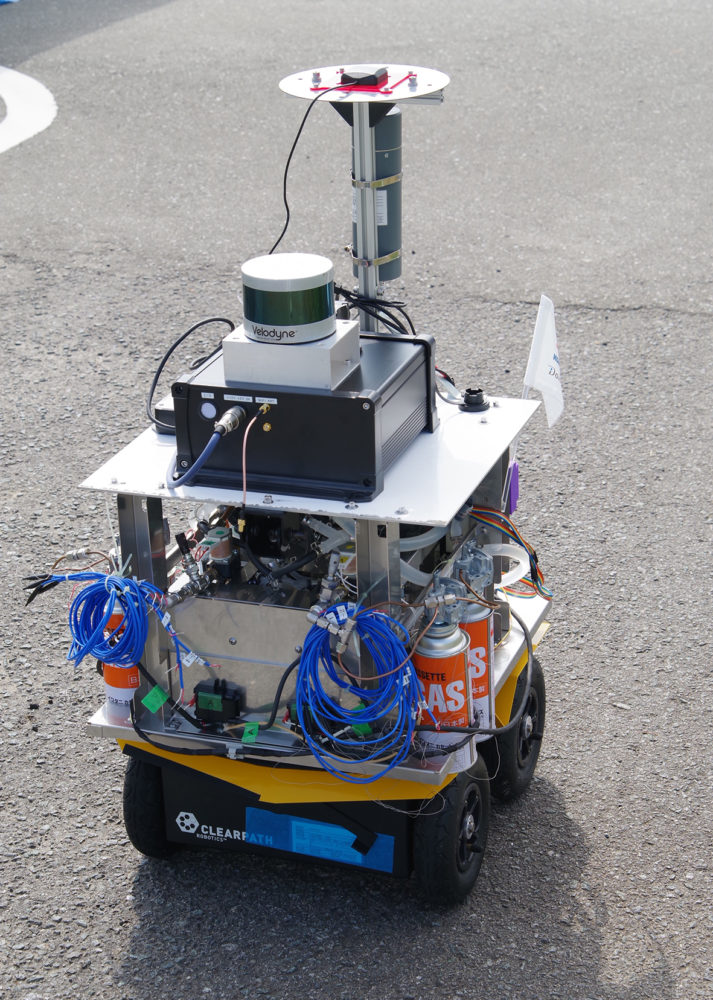
自律ロボットの概要
- カセットボンベを燃料とし、触媒燃焼を用いた高効率熱電発電システムによって発電。その電力を用いて自律ロボットを走行。
- 自律ロボットには位置情報センサーやカメラを搭載し、あらかじめプログラムされたルートに沿って無人で走行。線量計により、ロボット周囲の放射線量を計測。
- 静音、一酸化炭素や窒素酸化物の排出ゼロ。
- 本体サイズ、重量(それぞれ熱電発電システム含む):幅45cm×奥行52cm×高さ52cm、約30kg
- 発電量:70W(可搬型の熱電発電システムとして日本最高レベルの発電量です)
- 実地走行テスト時点での駆動時間(カッコ内は9月のシステム改良時の見込み駆動時間)
| カセットボンベ2本搭載 | およそ6時間(20時間) |
| カセットボンベ4本搭載 | およそ12時間(40時間) |
| カセットボンベ8本搭載 | およそ24時間(80時間) |
リチウムイオンバッテリーを搭載したロボットの場合、駆動時間はおよそ8時間です。同じ時間駆動させる場合、必要となるカセットボンベの質量はリチウムイオンバッテリーの2分の1です。カセットボンベは軽量なので、本数を増やすことでその分駆動時間を伸ばすことができます。
自律ロボットの用途
狭小空間や危険地区など、人が入れない場所の探索を想定しています。無人型かつ長時間走行が可能なので、従来のリチウムイオンバッテリー搭載ロボットよりも探索範囲の拡大が期待できます。
開発者コメント
ダイニチ工業株式会社 執行役員 第二開発部長 横尾直樹
今回の研究開発により、長時間駆動ができないという課題を持っている自律ロボットに、高効率な熱電発電システムを組み込むことにより、その課題をクリアできる道筋をつけることができました。
また、70Wという大きな発電を実現できたことにより、従来適用できなかった機器に熱電発電システムが適用可能となることを示すことができました。
実地走行テストについて
2021年7月26日(月)、福島県双葉郡大熊町にてロボットの実地走行テストを行いました。現地は帰還困難地域に該当します。
成果
1.8kmの道路をおよそ1時間20分かけて自走しました。
ロボットには線量計を搭載し、周囲の放射線量を測定、記録しました。

